

高端装备制造行业发展现状与未来趋势
新型激光辨识算法助力机器人逃离死胡同
2021-12-28
阅读量:342 来源:机智网
最近北美大学的学生体会到了人工智能带来的生活上的便利,他们足不出户便可以吃到机器人送的餐,虽然这些送餐机器人看似聪明能干,但也存在明显的缺点,它们不太能够辨识方向并及时预测到前方的死胡同和障碍物。
近日,哥白尼大学工程技术研究所的研究人员解决了这个问题,他们开发了一种新算法,可以帮助机器人逃离死胡同和躲避障碍物。
这个算法的原理来自于人脑,人们为什么不会在复杂的建筑中走进死胡同呢?因为人是有感知能力的,也就是当我们看到图标、标志牌时,可以评估出我们前方是否有障碍物,人脑的这种灵活性会让我们走在路上时刻辨识方向,而不至于走到街道尽头再去分辨。
人脑能带着人走上正确的道路,不会浪费时间回头,那么机器人是否可以做到呢?
“这正是我们在开发路径规划算法时所基于的行为,该算法可以让移动机器人避开死胡同”,美国国立中央大学工程技术研究所教授Tomasz Tarczewski解释道。
“如今,移动机器人在仓库和生产车间越来越普遍,尽管有特殊的路径,但master算法协调多个机器人在一个大厅的工作,也会出现路径被阻塞的情况,它们的主要问题是,它们经常进入所谓的死胡同,”Tarczewski教授说,“一个无碰撞通道对生产周期的安全至关重要。”
解决这一问题的一种方法是实施局部路径规划算法,以减轻避开各种类型的障碍,多亏了这些算法,机器人才有可能自动解除自己的封锁,继续它的路线。
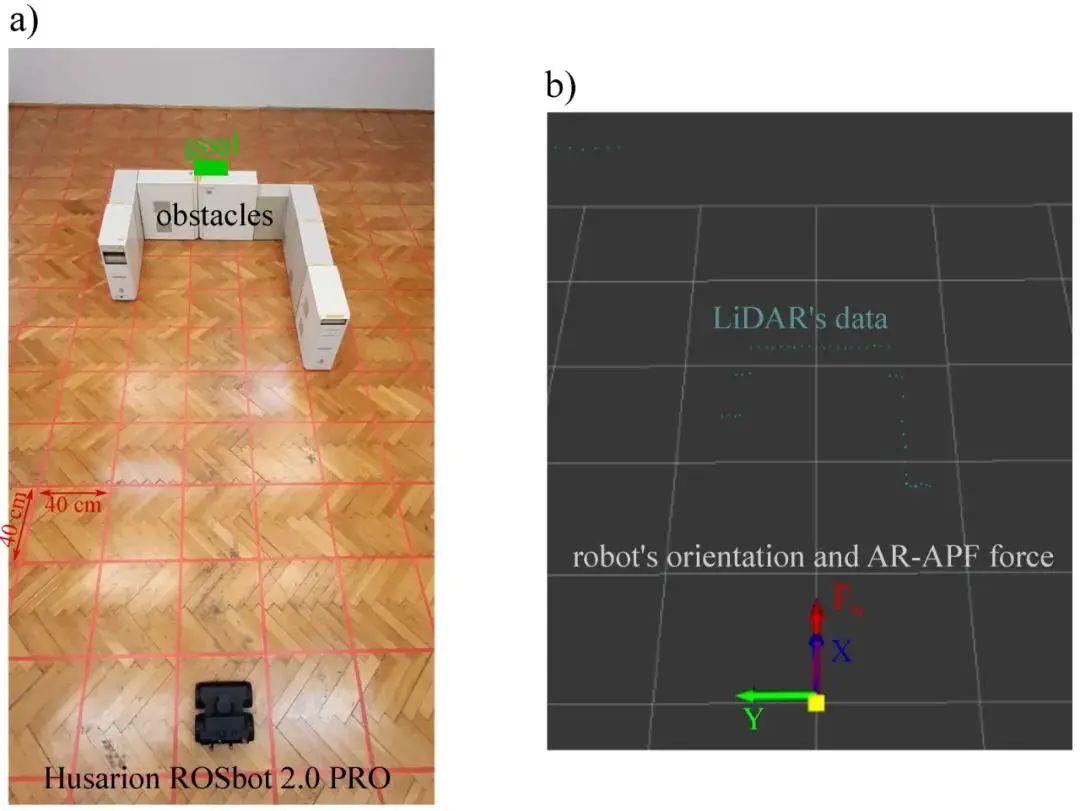
“大多数这些机构的操作原理都涉及到引入额外的算法,引导机器人走出死胡同。在这种方式下,由于更换了路线,移动机器人行走的距离增加,造成不必要的电力消耗,”Rafal Szczepanski解释说。“为此,我们使用了激光雷达传感器,即激光扫描仪,提供机器人与障碍物的距离信息。”
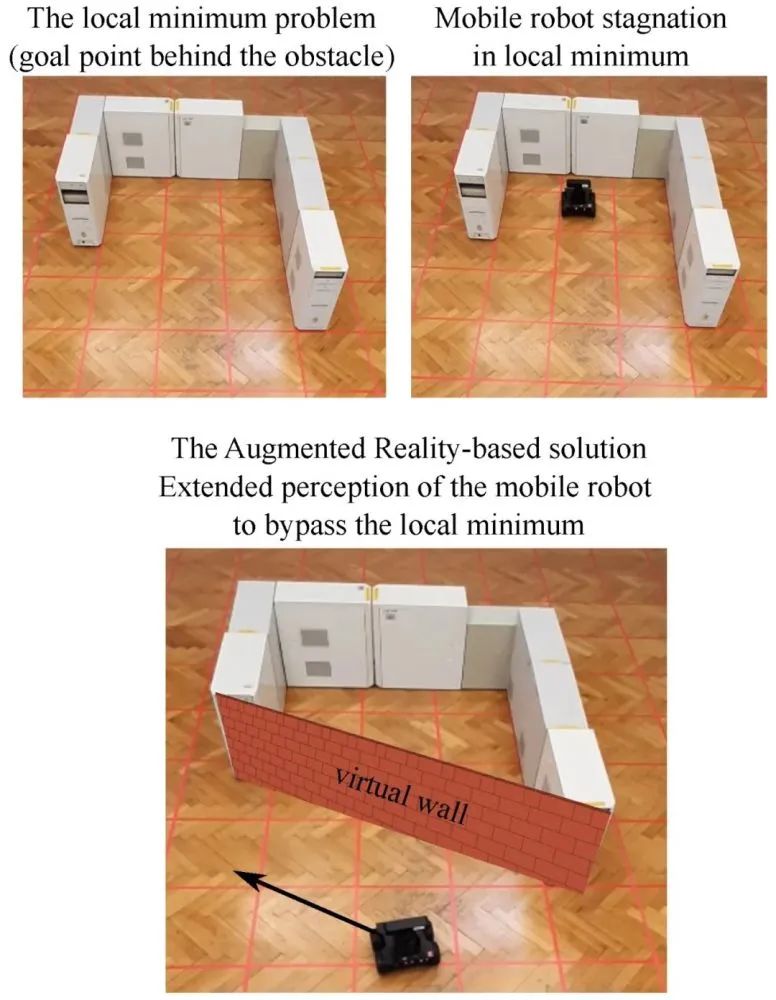
然后,基于这些读数,工程技术研究所的研究团队开发了一个终端预测机制:机器人将可用空间的实时信息与其自身的尺寸进行比较,并基于这些信息做出通过性的决定。为了让机器人放弃探索不可通过的部分,它必须配备绕过它的机构。
“一般来说,它是创造额外的虚拟对象,并将它们添加到现实中。这种技术通常用于智能手机、平板电脑上的各种应用程序,如手机游戏、照片和视频应用程序以及教育玩具,”Artur Bereit说。
“它的工作原理是,当检测到死胡同时,就会在机器人的左侧或右侧创建一个虚拟墙或一个额外的障碍,阻止它通过,以引导它朝正确的方向前进。”Rafal Szczepanski解释道。“正是这种移动机器人和增强现实技术的创新和跨学科结合,让我们能够发表我们的研究结果。”
“我们的研究团队在移动机器人Husarion robot 2.0 PRO中实现了增强现实技术支持的势场法的开发算法,并进行了一系列的实验室测试,以证明提出的解决方案的有效性。研究结果是非常有前途的——我们证明了在移动机器人中常用的势场算法的性能上得到了显著改进。
版权与免责声明:
如涉及网站内容、版权等问题,请及时通知我们,本网站将在第一时间及时删除。
本站注明“来源:机智网”的所有作品,版权均为机智网(www.jqzns.com)所有,转载请注明出处。
本网转载并注明自其它来源的作品,均来自互联网或者用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。


焦点推荐

TOP1
深度解析2023年移动机器人行业的十大预测
2022-12-20
1120

TOP2
无人叉车在汽车汽配行业产线与仓储的应用逐渐增多,盘点6大应用难点
2022-07-28
1905

TOP3
利润大降22% | ABB公布2022年第二季度及上半年业绩
2022-07-28
2171

4
浙江数字经济“一号工程”如何升级?“数字工厂”和“未来工厂”有啥不同?省经信厅新闻发言人权威解答
2022-07-18
1648

5
宁波海曙发力打造智能制造集群,60个项目总投资达550亿元
2022-05-11
1499

6
数据公布!我国2022年3月份规模以上工业增加值增长5.0%,其中工业机器人产量44322套,增长16.6%
2022-04-20
9609

7
一文看懂机器人技术的发展史
2022-03-30
2066

8
万马股份:打造“中国籍”机器人线缆 助力产业链国产化进程
2022-03-29
1599
9
总额超107.02亿元!2022年Q1机器人行业融资一览
2022-03-29
1664

10
酝酿七年美的拿下库卡,机器人四大家族加快本土化布局
2022-03-29
1489