
高端装备制造行业发展现状与未来趋势
新研发的多模态软体抓持手轻松解决抓取难题
2020-09-25
阅读量:164 来源:机智网
实现对各种不同大小、形状和硬度的物体无损抓取是科学家们数十年来的追求目标。近年来,越来越多的工作致力于提高多指软体手对被抓物体的适应性和负载能力的研究,但是抓取过程复杂,在抓取过程中需要不断调整手指和物体之间的相对位姿,并且实时调控抓取力度。近期,北航和加州大学圣巴巴拉分校别出心裁,联合研发了一种新型的、无指的多模态软体抓持手,在实现了对各种形状和大小的物体自适应完全包覆的同时,利用仿生壁虎刚毛结构大大提高了负载能力。
该软体手将多个独立的腔道并列圆周排布。腔道充气时,软体手向外膨胀,打开内部空间,腔道抽气时,软体手向内收缩,内部空间收缩。通过这种简单的控制,软体手可以在收缩时利用内壁“吞并”物体,也可以在膨胀时利用外壁抓取物体内腔。为了提高软体手的安全性,研究团队设计出一种失稳腔道结构,使软体手在贴附物体后,腔道内壁因失稳而不能施加横向压力;为了提高负载能力,研究团队通过转印技术在软体手的内壁加工出一层仿生壁虎刚毛微结构,使软体手在没有驱动的情况下也可以轻易抓取20N的负载,因此该软体手兼具高安全性和高负载能力。

图1.软体手结构
通过给软体手末端设计一层特殊的唇圈结构,使软体手在充气的时候内部空间因容积膨胀而产生负压,该软体手还可以吸附在物体表面而实现抓取。区别于传统的工业吸盘,该软体手的吸附抓取并不需要持续抽气来产生负压,大大节省了能源。
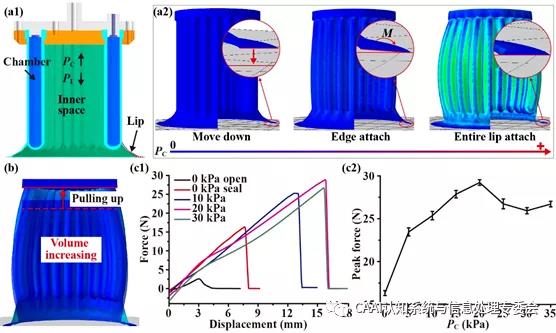
图2.充气产生负压吸附
软体手的结构设计虽然简单,但是却可以实现三种抓取模态:通过先充气再抽气,可以完全包覆各种形状和大小的物体;通过先抽气再充气,可以将软体手置于物体内腔中,并挤压内腔而实现抓取;利用唇圈密封内部空间,可以在给腔道充气使通过内部空间容积变化产生的负压而吸附物体。将仿生壁虎刚毛和失稳结构有机结合,该软体手还可以在不损坏物体的前提下大大提高抓取负载,甚至可以在没有驱动的情况下仅仅通过壁虎刚毛而抓取物体。与传统的软体手相比,该软体手在抓取物体的过程中不需要考虑物体的形状和大小等信息,也不需要实时计算物体和手之间的相对位姿来提取合适的抓取点,因此大大简化了抓取任务的复杂度。

图3. 不同抓取模态对不同物体的抓取
该研究成果于2020年9月18日发表在机器人领域顶级期刊《IEEE Transactions on Robotics》上。论文第一作者和第一通讯作者为北京航空航天大学博士毕业生郝雨飞,师承王田苗教授,现为瑞士洛桑联邦理工学院(EPFL)Herbert Shea教授课题组在站博士后。论文合作通讯作者为加州大学圣巴巴分校的软体机器人和触力觉领域专家Yon Visell 教授。Elliot Hawkes教授为该研究提供了仿生壁虎刚毛技术支持,并对研究方案提出了宝贵的建议。该成果受到国家留学基金委(CSC)和美国自然科学基金(NFC)的支持。
版权与免责声明:
如涉及网站内容、版权等问题,请及时通知我们,本网站将在第一时间及时删除。
本站注明“来源:机智网”的所有作品,版权均为机智网(www.jqzns.com)所有,转载请注明出处。
本网转载并注明自其它来源的作品,均来自互联网或者用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。


焦点推荐

TOP1
深度解析2023年移动机器人行业的十大预测
2022-12-20
1091

TOP2
无人叉车在汽车汽配行业产线与仓储的应用逐渐增多,盘点6大应用难点
2022-07-28
1844

TOP3
利润大降22% | ABB公布2022年第二季度及上半年业绩
2022-07-28
2129

4
浙江数字经济“一号工程”如何升级?“数字工厂”和“未来工厂”有啥不同?省经信厅新闻发言人权威解答
2022-07-18
1629

5
宁波海曙发力打造智能制造集群,60个项目总投资达550亿元
2022-05-11
1477

6
数据公布!我国2022年3月份规模以上工业增加值增长5.0%,其中工业机器人产量44322套,增长16.6%
2022-04-20
9584

7
一文看懂机器人技术的发展史
2022-03-30
1986

8
万马股份:打造“中国籍”机器人线缆 助力产业链国产化进程
2022-03-29
1569
9
总额超107.02亿元!2022年Q1机器人行业融资一览
2022-03-29
1631

10
酝酿七年美的拿下库卡,机器人四大家族加快本土化布局
2022-03-29
1466