
高端装备制造行业发展现状与未来趋势
高精度显微外科手术机器人上线!仅重2.4g,速度15mm/s
2020-09-15
阅读量:191 来源:机智网

众所周知,显微外科手术往往伴随着极大的风险,需要医生极其精细且复杂的操作,如此还是难免意外的发生。为了避免出现更多的意外,科学家们希望可以制造出机器人来替代一部分需要人手的工作,减轻医生的负担,也保证手术的安全与稳定。从而来自索尼集团和哈佛大学的研究者们 (Hiroyuki Suzuki和Robert J. Wood) 基于折纸结构研发了一款超轻便,高精度的显微外科手术机器人——mini-RCM,该项研究发表于nature旗下新子刊《nature machine intelligence(自然-机器智能)》,并登上该期刊8月份封面。这款手术机器人是专门为远程操作的显微手术而设计的,它仅仅重达2.4g,尺寸为5cm x 7cm x 5cm, 由三个独立驱动的微型直线驱动器驱动,每一个直线驱动器重量仅为0.41g。经分析和测试,该机器人的位置精度可以达到0.0264mm,负载能力大约为27mN。通过实验测试展示了该机器人在显微外科手术领域巨大的应用潜力。
图1. 仅仅重达2.4g的手术机器人mini-RCM
1. 基于折纸结构设计的显微外科手术机器人mini-RCM
显微外科手术是指利用显微镜等光学放大设备进行毫米,甚至微米尺度的外科手术,例如缝合血管(0.3到0.8mm),神经等。该项手术对于医生的技术和操作要求非常之高,主要受限于人手在手术操作过程会不可避免的出现极其轻微的震颤或者抖动,因此全世界只有少数外科医生会操作。相比于人的肌肉,机器人有着更高的精度和稳定度,更加容易操作,因此,用于外科手术的机器人近几年得到了大力发展,尤其是显微外科手术机器人,包括眼科手术和神经手术等。利用远端操作设备,放大机器人的微小动作到人手的较大动作,可以极大的提高手术过程的精度。近几年科学家们已经研制了各种手术机器人,但目前来说它们的体积都较为庞大,且基本不具备柔顺性。

图2. 显微外科手术机器人
近日,来自索尼集团和哈佛大学(RobertJ. Wood)的研究者们提出了一款新型的,由折纸结构启发的微型手术机器人,mini-RCM,并将研究成果整理发表于nature旗下新的子刊《nature machine intelligence(自然-机器智能)》上。(Robert J. Wood是哈佛大学的教授,专门负责研发微型机器人,他的团队已经在science或者nature正刊和子刊上发表多篇论文,文末附有他领导的实验室网站)。
他们在论文中指出,要想研发一款微创手术机器人,有三个要素需要考虑:
1. 具有远端运动中心(RCM)的结构;
2. 尺寸小,提高便携性,减少机器人和手术器械以及病人的接触风险;
3. 具有重力补偿和反向传动能力;

图3. 折纸结构启发的手术机器人mini-RCM
折纸结构设计可以利用轻薄而坚硬的的薄片材料构建三维结构,满足设计者的需求。Mini-RCM手术机器人启发自“立体书”折纸结构,基于微型电子机械系统(MEMS)的原理设计。据研究者称,这款机器人仅仅重达2.4g,其中,机器人本体(连杆结构)重力约为1.2g,另外有三个超微型的直线驱动器,每个重量约为0.4g。真可谓“轻如鸿毛”,喜欢的话可以直接揣兜里带走!
可以看到,通过和真人大小的头部模型对比,这款手术机器人的尺寸微小精妙,仅有5cm x 7cm x 5cm见方。相比于其他一些现存的手术机器人,尺寸真的是mini-RCM的一大优势。
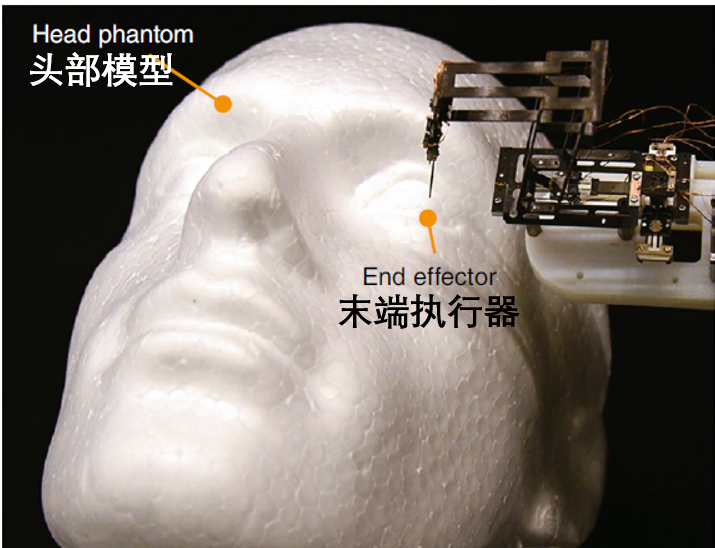
图4.Mini-RCM的尺寸——和头部模型对比
该手术机器人由三个微型的直线驱动器驱动,电源和控制信号通过远端设备进行传输。
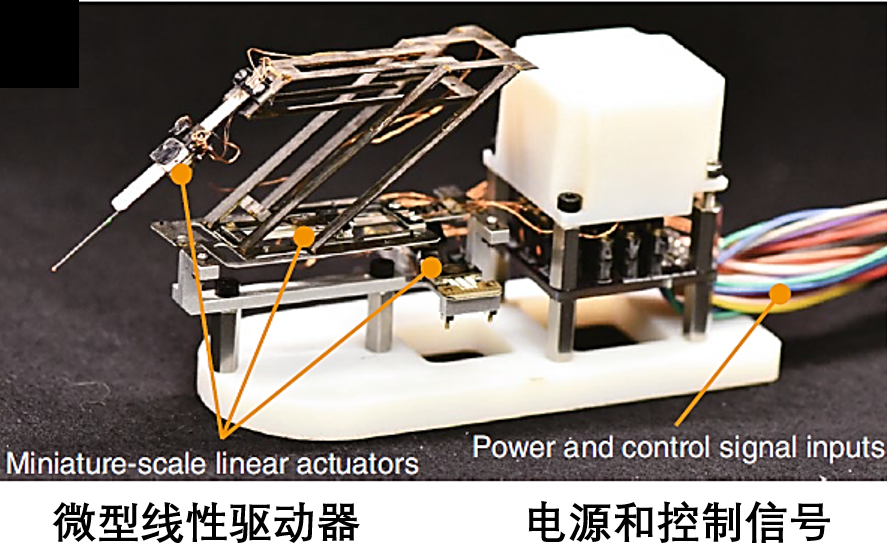
图5. Mini-RCM的关键部件
研究者展示的微型线性驱动器,尺寸仅为28 mm × 7 mm × 3.6 mm,驱动原理为压电陶瓷的粘滑效应,步长可以去到0.5mm,速度可以去到15mm/s,最大输出力可达170mN。
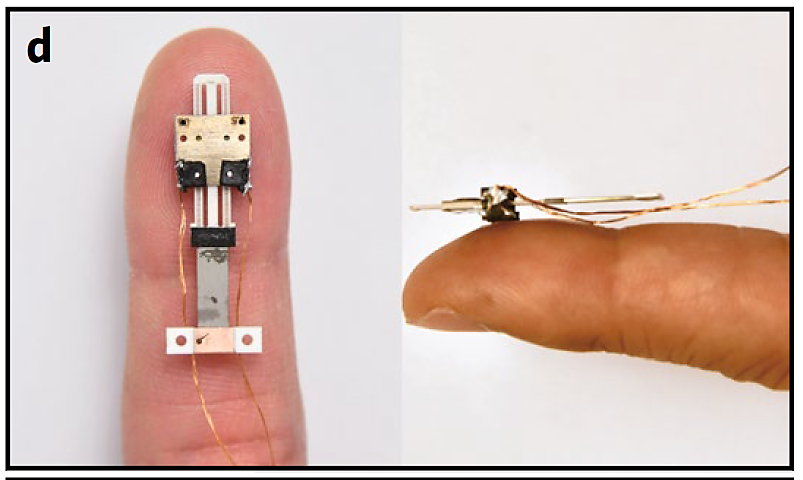
图6. 微型直线驱动器
这款手术机器人这么小,它到底能做什么呢?我们赶快欣赏一下这款手术机器人精妙的展示。在本文的第二部分会向大家介绍这款机器人的设计原理。另外,文章末尾附有完整的视频和论文信息,感兴趣的读者不要错过喔!
图7. 机器人绕着远端旋转中心(RCM)运动
Mini-RCM的主体采用了并联机构设计,这种机构可以绕着一个远端固定点的进行旋转,该固定点被称为远端运动中心(RCM)。这种结构设计被广泛应用于微创手术机器人设计,以避免机器人在运动过程中对切口部位施加过多的力。
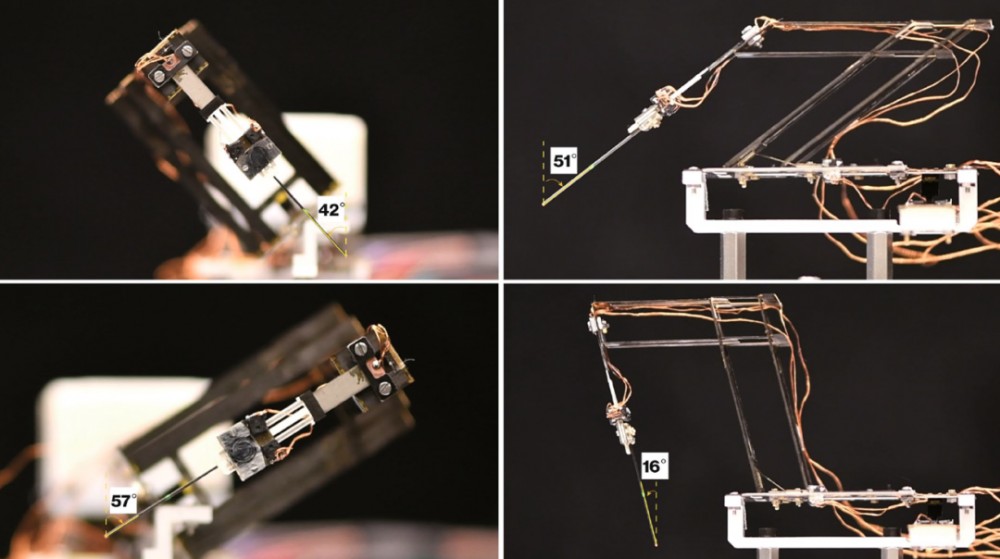
图8. Mini-RCM手术机器人的运动范围展示
Mini-RCM的另一个特点就是它的加工和制造比较方便,它的结构本体启发自一个我们生活中经常见到的折纸结构,立体书(pop-up book)。通过激光切割好所需要的形状以后,机器人的主体部位就可以根据既定的形状实现自主“装配”。

图9. “立体书”本体自主装配
利用机器人进行显微外科手术操作有一个好处就是,可以通过电信号对机器人本身微小的行程进行放大,例如将1mm的机器人的运动放大到遥操作设备上对应的1cm,这样的话可以极大的降低医生手术的难度,提升手术的稳定性和安全性。
图10.机器人运动的遥操作
研究者们展示了一组对比实验,即用手跟踪0.5mm边长的正方形轨迹,和用mini-RCM绘制相同轨迹。可以看到,用手直接跟踪轨迹时,抖动非常明显,但是相比来说用mini-RCM绘制轨迹则要稳定的多。

图11.画0.5mm正方形——手动和机器人操作对比
研究者展示了一个模拟的显微手术实验,用0.2mm直径的硅胶管模拟人眼球内“视网膜静脉”,对其进行显微插管实验。在显微镜下,通过安装于mini-RCM末端的针尖可以较为容易的实现插管操作。
图12.显微外科手术模拟——0.2mm插管实验
2. 设计结构及其原理
为了实现远端中心运动(RCM),大多数手术机器人的采用并联机构设计或者是球关节串联机构设计。并联机构有着较为广泛的运动范围和简单直接的设计,但是并联机构包含有很多的节点,这使得传统的设计难以制造小尺度的并联机构。为了解决这一问题,研究者采用了一种巧妙的折纸结构:立体书结构(pop-up book),并且结合了微机电系统(MEMS)的设计和制造方式。

图13.机器人本体——折纸结构
Mini-RCM机器人的本体是由十多层不同材料叠加而成。通过激光切割可以直接切除所需要的形状,并且将不同层的形状粘连热压,就得到了机器人的主体部分。在关节处采用有一定弹性的材料(例如聚酰亚胺),在支架部分采用刚性的硬材料(例如碳纤维)。
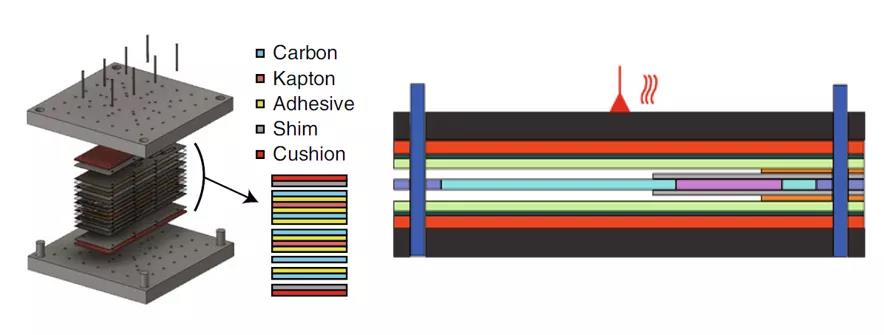
图14.多层材料热压成型
通过研究者的巧妙的结构设计,mini-RCM机器人在空间中有三个自由度,其中包括两个旋转自由度和一个平移自由度。

图15.机械结构简图
Mini-RCM机器人的运动范围展示如下图,分别是沿着远端旋转中心点的两个方向的旋转,以及平移运动。
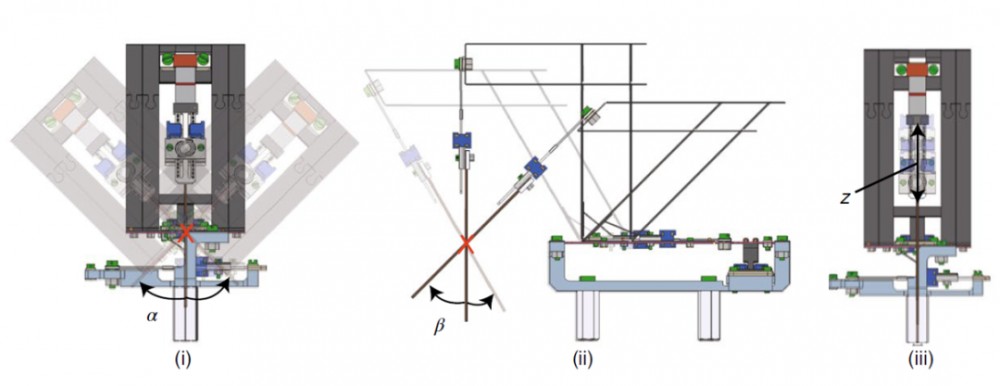
图16.运动范围示意图
为了驱动如此细小的折纸结构,对于驱动器的设计也要满足微型化。研究者们采用了一种基于压电陶瓷粘滑效应(惯性效应)的直线驱动器,考虑到它的运动范围广,以及输出力重比较高。这种直线驱动器技术相对较为成熟可靠。通过实验测试,研究者设计的这款直线驱动器最大速度可以达到15mm/s左右,最大输出力约为150mN。

图17.微型直线驱动器设计原理
为了测量直线驱动器的位移信息,从而对其进行控制,研究者采用了常见的光电传感器的原理,即利用光电遮挡器来获取滑块的位置信息,这样的设计测量精度较高,大约为50微米,即0.05mm。

图18.直线驱动器传感
研究者用一个正弦的输入信号来控制线性驱动器,下图展示了直线驱动器的运动模块以正弦波做往复运动。
图19.正弦曲线往复运动
直线导轨的运动的分辨率(步长)为0.5mm每步。

图20.0.5mm步长运动
通过遥操作的机构,一定程度可以放大直线驱动器的运动控制,从而让人手在操作机器人时候变得更加容易。
图21.远程操作导轨运动
在前面展示过的跟踪0.5mm正方形轨迹的实验中,手动跟踪轨迹的误差大约落在151.7微米左右,用mini-RCM进行轨迹跟踪的误差仅为47微米,把手术操作的精确度提升了3倍多。
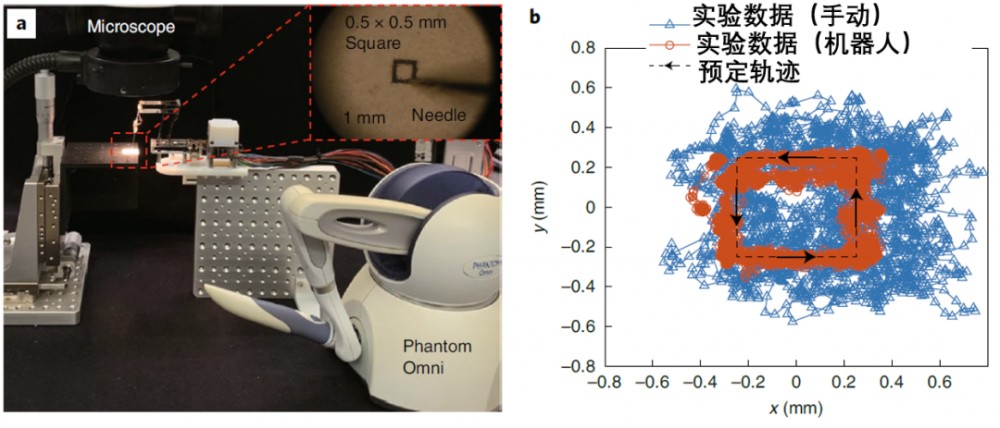
图22.手动直接操作和机器人操作对比
另外,mini-RCM的另一个优势就是当机器人的电力出问题时,可以轻易的用手移除,从而避免手术意外对于病人造成的伤害。
图23 断电手动移除机器人设备
3. 总结与展望
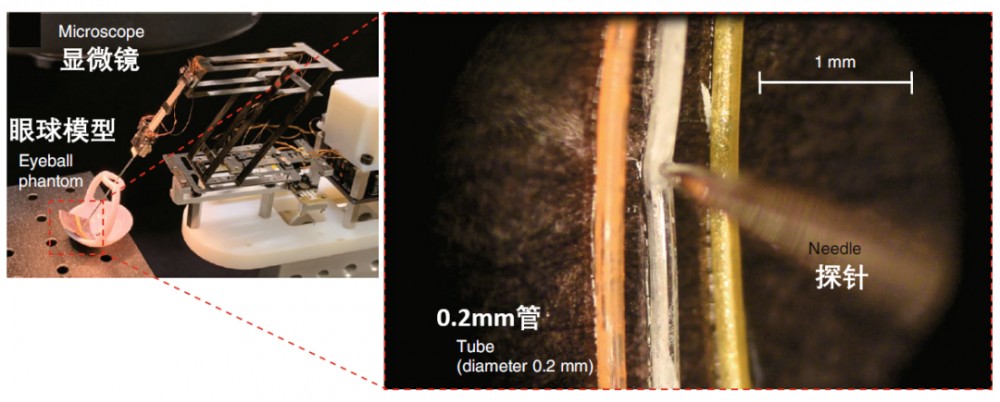
图24.模拟手术实验展示
可以看到,相比于传统结构的手术机器人,折纸结构启发设计的mini-RCM手术机器人有着尺寸小,精度高的特点。通过一些遥操作的实验,mini-RCM展示了一些它在显微外科手术中应用的潜力。相比于手动直接操作手术,借助于手术机器人可以放大手术操作的尺度,从而实现高精度的操作。
当然,作为第一代折纸显微外科手术机器人,更多程度上还是一个概念性的展示,如果要真正投入实用,还有很长的路要走。研究者指出,在未来,通过结构设计的优化,他们希望能够进一步提高mini-RCM的定位精确性和输出力,从而真正能够把它推向显微外科手术机器人市场。
文末视频:
版权与免责声明:
如涉及网站内容、版权等问题,请及时通知我们,本网站将在第一时间及时删除。
本站注明“来源:机智网”的所有作品,版权均为机智网(www.jqzns.com)所有,转载请注明出处。
本网转载并注明自其它来源的作品,均来自互联网或者用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。


焦点推荐

TOP1
深度解析2023年移动机器人行业的十大预测
2022-12-20
1090

TOP2
无人叉车在汽车汽配行业产线与仓储的应用逐渐增多,盘点6大应用难点
2022-07-28
1843

TOP3
利润大降22% | ABB公布2022年第二季度及上半年业绩
2022-07-28
2126

4
浙江数字经济“一号工程”如何升级?“数字工厂”和“未来工厂”有啥不同?省经信厅新闻发言人权威解答
2022-07-18
1626

5
宁波海曙发力打造智能制造集群,60个项目总投资达550亿元
2022-05-11
1475

6
数据公布!我国2022年3月份规模以上工业增加值增长5.0%,其中工业机器人产量44322套,增长16.6%
2022-04-20
9583

7
一文看懂机器人技术的发展史
2022-03-30
1981

8
万马股份:打造“中国籍”机器人线缆 助力产业链国产化进程
2022-03-29
1567
9
总额超107.02亿元!2022年Q1机器人行业融资一览
2022-03-29
1628

10
酝酿七年美的拿下库卡,机器人四大家族加快本土化布局
2022-03-29
1465