
高端装备制造行业发展现状与未来趋势
模块化机器人Limpet II——监控和检测海洋的新助手
2020-09-03
阅读量:185 来源:机智网
近日,英国爱丁堡大学推出了名字叫Limpet II的新设计制造的一款模块化机器人,可以说是刚柔并济,那么我们今天来了解一下他的组成及用途吧!
Limpet II是设计来检测和监控海上能源平台的,它的驱动器(腿部)采用模块化的,刚柔结合的设计方法,同时在机器人躯干部份集成了丰富的传感器模块。Limpet II 采用一个电磁铁原理驱动的执行器作为核心部件。它可以实现吸附和爬行功能,吸附功能是由负压驱动的吸盘实现的,Limpet II集成的传感器多达9种,可以对包括温度,湿度,声音,光照等信号做出反应,因此适合被用于检测复杂环境的变化。该研究于前不久发表于国际著名机器人期刊《软体机器人(soft robotics)》上。

图1 小短腿Limpet II:别想摸到我!
1. 模块化+无束缚的软体机器人Limpet II
模块化机器人往往是由几个相同或者是相似的模块组合而成。相比传统机器人,模块化设计的机器人有很多好处,它简化了机器人的设计和制造。一旦设计好一个模块,就可以根据不同的应用场景和需求,拼接出不同外形和功能的机器人。与传统机器人相比,模块化机器人的功能和效率更高。

图2EPFL可重构机器人实验室(reconfigurable Robotics lab)的模块化机器人
提及模块化机器人,就不得不提起来自EPFL(洛桑联邦理工)的可重构机器人实验室(reconfigurable Robotics lab),该实验室致力于研发基于软体机器人以及折纸机器人技术的模块化可重构机器人,已经在世界顶级机器人期刊(science robotics,IJRR,IEEE TRO和soft robotics等)上发表多篇相关论文,感兴趣的读者可以去了解一下。
图3 模块化折纸机器人和气动软体机器人(来自EPFL reconfigurable Robotics lab)
Limpet II由英国爱丁堡大学的微纳米系统集成研究所的团队研发,于近日发表于国际著名机器人期刊《软体机器人(Soft robotics)》上。Limpet II的外型被设计的犹如一只大型水母,在它的身体框架内包裹着各种模块,例如负责攀爬时吸附地面的吸附模块,负责提供运动能力的运动模块,负责电源和控制的驱动模块以及传感器模块(集成了9种传感功能)。据研究团队称,这款机器人主要是设计用于海洋能源平台的监控和检测。海洋能源平台环境复杂多变,因此需要机器人有着较好的适应性和灵敏的检测能力。Limpet II 富集了近乎9种传感器,可以更好的检测复杂的环境中的变化。
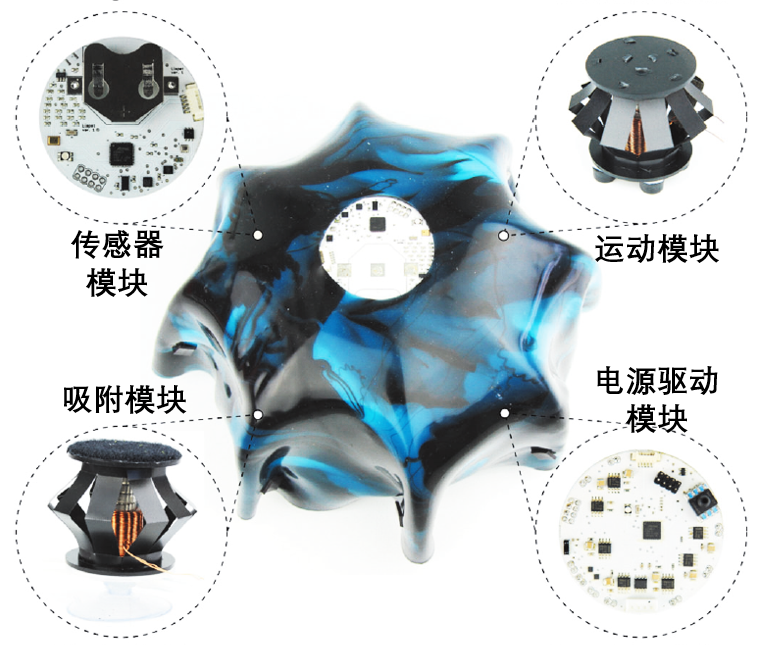
图4 模块化软体机器人“Limpet II”
为了实现机器人的在复杂环境种运动的柔顺性和适应性,Limpet II的腿部采用了刚柔并济的模块化设计。腿模块采用“剪纸弹性结构“让它具有天然的柔顺性,同时采用电磁铁原理(同级相斥,异级相吸)来进行控制变形。由于这种机构在收缩时仿佛一根弹簧一般,通过控制线圈中的电流可以控制腿部的运动方向,速率,以及幅度,实现了可控的柔性收缩伸展运动。Limpet II的运动就是靠有规律的控制腿部模块来实现。
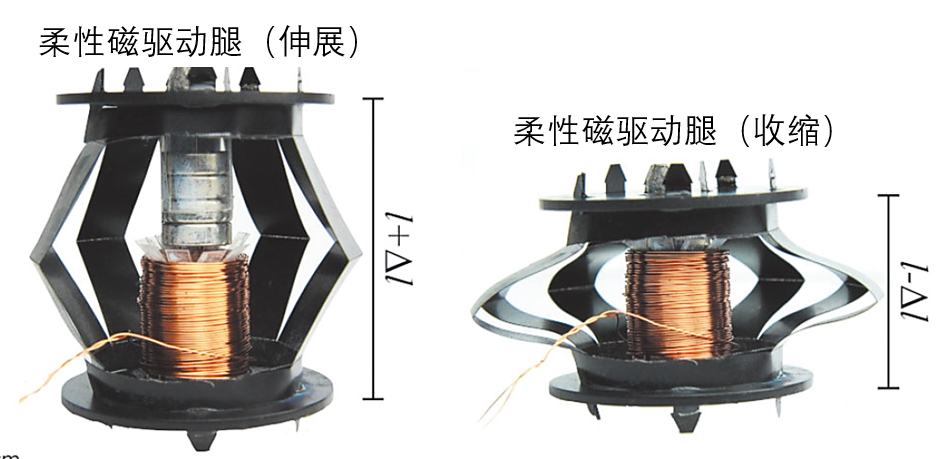
图5 电磁铁腿部模块伸展和收缩状态
在这里小编先为大家呈现一下Limpet II的一些实测展示,在第二部分为大家简单介绍Limpet II的设计以及一些相关的测试。文末附有完整视频和文章信息,感兴趣的读者们不要错过!
下图显示了腿部模块的长短可以用输入电流信号的带宽来调节(PWM),可以看到不同的占比的带宽(0%到100%)对应着不同的腿部模块的长度。

图6 单个腿模块驱动展示
腿部模块运动的快慢可以通过控制输入电流信号的频率来调节,下面分别是低频率驱动和高频率驱动的展示,可以看到随着电流频率的增加,腿部模块的收缩速度可以去到非常快(快到模糊)。
图7 低频率驱动

图8 高频率驱动——快到模糊
腿部模块可以按照一定的方式组合,让机器人呈现出不同的外型和不同的功能。研究者设计了单模块,双模块和四模块机器人。下图展示了双模块和四模块机器人。当两个模块以不同的运动模式进行驱动时,机器人可以沿着直线行走到目标点。而对于四模块的机器人,可以通过更加复杂的控制,而实现对于特定运动轨迹(正方形)的跟踪。
图9 双模块运动展示

图10 四模块正方形运动轨迹展示
位于LimpetII 顶部的传感器模块可以接收包括声音刺激,光刺激,障碍物,温度湿度等外界信号,并作出反应,这里向大家展示了Limpet II 在红色光源和蓝色光源下不同的响应状态。
图11 光刺激——红色光
图12 光刺激——蓝色光
由于LimpetII 的工作环境需要进行一些攀爬,研究者为Limpet II安装了一个负责吸附的真空吸盘,下图展示了Limpet II可以攀爬倾斜角度较大的光滑表面。
图13 斜坡爬行侧视

图14 斜坡爬行俯视
2. 结构设计和测试
这一部分简单介绍一下Limpet II的结构设计和一些测试。Limpet II 的腿部模块由顶部和底部两个硬质的支撑层组成,起到传导力的作用,顶部和底部支撑层由剪纸结构的硬质材料充当弹簧,在内部有线圈和永磁铁。当线圈中通电时,线圈内部会产生磁极,通过控制磁极的方向,强弱等参数,便可以实现永磁铁靠近或者被排斥原理线圈,从而实现了对于腿部模块的控制。具体来说,电流的方向可以控制弹性腿的变形方向,电流的频率可以控制弹性腿的运动频率,电流信号的带宽可以控制弹性腿收缩的百分比。
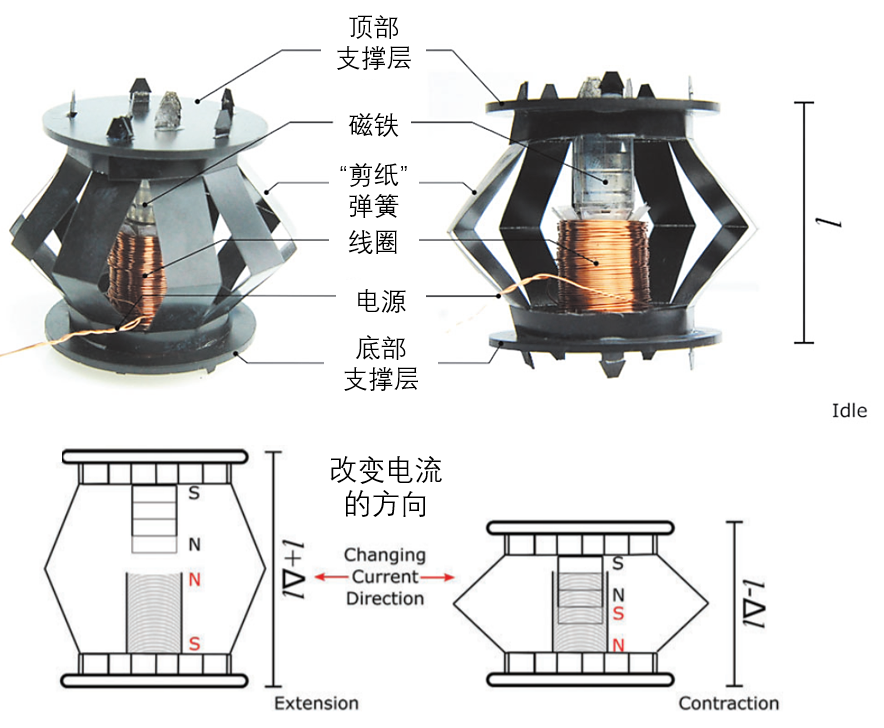
图15 “磁驱动”弹性模块腿的结构设计和驱动原理
通过不同的组合腿模块,可以实现不同外形和不同功能的机器人的设计,在该研究中,研究者展示了单模块,双模块和四模块的设计。模块越多,机器人的功能越复杂越强大。

图16 单模块,双模块和四模块设计
研究者测量了腿模块中,剪纸弹簧结构的刚度,通过力学测试得到了弹簧腿的刚度大约为45.5N/m。
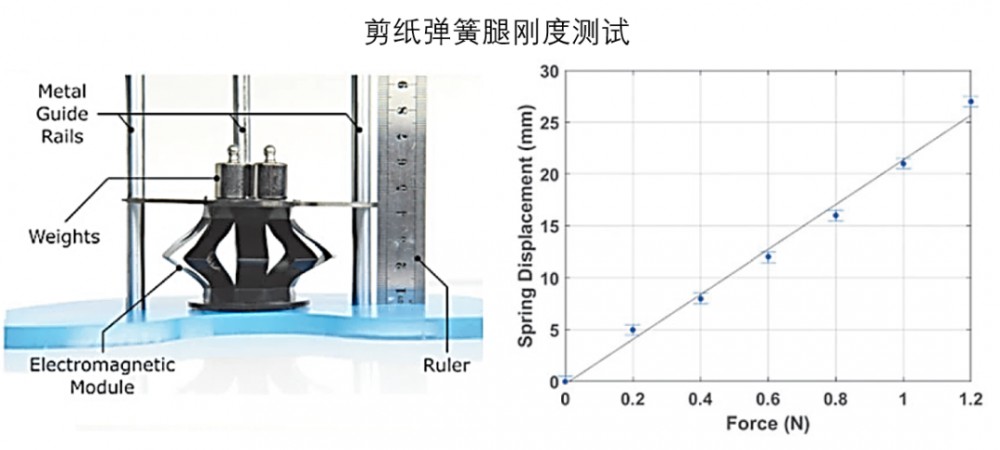
图17 刚度测试
另外,研究者通过控制线圈中的电流线性增加,测量了腿模块的输出力的变化。可以看到,输出力基本上和电流呈线性相关,这很好的简化了机器人腿模块的控制。最大的输出力可以达到1.8N,也就是单个腿模块可以驱动180g重量的负载。
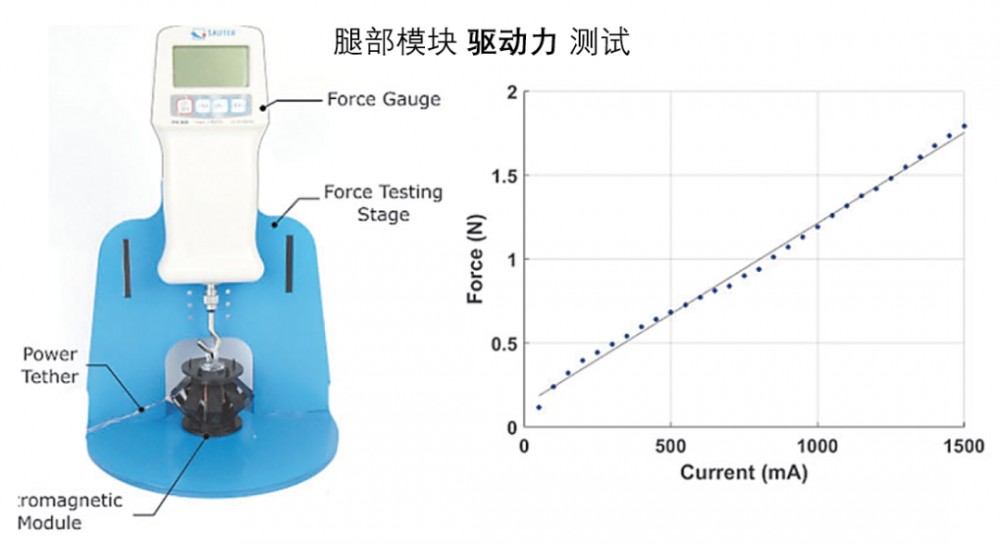
图18 驱动力测试
研究者为LimpetII 特别设计了驱动控制模块和传感器模块。这两个模块都高度集成了很多的控制器和接口,让Limpet II 的功能变得更加强大和复杂。下图是特别设计的控制模块。

图19 控制/电源模块
下图是特别设计的传感器模块,可以看到,研究者集成的传感器包括,温度,湿度传感器,压力传感器,光传感器,加速度传感器,陀螺仪,霍尔传感器,位置传感器,以及麦克风九种不同功能的传感器。富集了如此众多的传感器信号,可以让Limpet II在复杂的环境中,例如海洋监测平台上,灵敏的检测周围环境温度,湿度,光照等信号变化,满足检测需求。
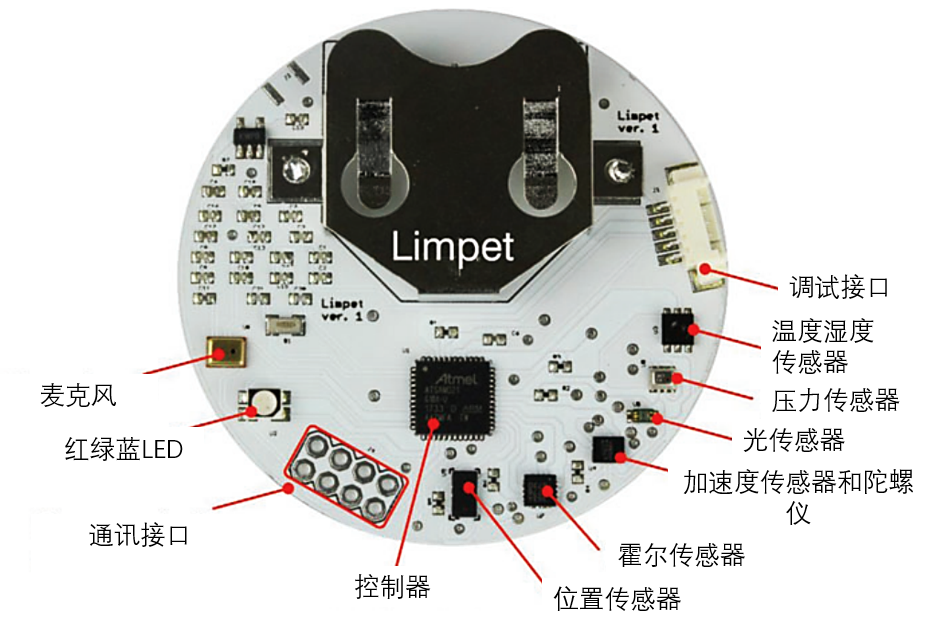
图20 传感器模块
3. 总结与展望
研究者们在论文末尾指出,现有的攀爬机器人大多使用刚性结构,柔性驱动的机器人尚未实现完全的无束缚状态。另外大多数攀爬机器人也并非以模块化方式构建,这使得机器人系统难以适应新任务,同时出问题后也难以修复。在他们的工作中,提出了一种模块化设计的无束缚的刚柔混合的机器人Limpet II。Limpet II可以通过组合不同的模块以完成不同的任务,目前的测试展现了它能够攀爬倾斜的表面结构,并感知其所处的复杂环境中的变化。Limpet II具有的9种不同的传感器,可使其用于检查和监控海上能源平台。
可以看到,虽然文中研究者指出它们的机器人是设计用于海洋能源平台的检测监控,但是实地化的测试还没有展示出来。小编认为目前Limpet II机器人可能功能上还不具备很好的实地操作的能力,希望在将来能够看到升级版的Limpet III被真正用于相应的场景发挥作用。另外希望这篇报道能够启发感兴趣的读者,你们也可以开发出自己的模块化机器人,用作其他许多不同的场景。
文末视频
版权与免责声明:
如涉及网站内容、版权等问题,请及时通知我们,本网站将在第一时间及时删除。
本站注明“来源:机智网”的所有作品,版权均为机智网(www.jqzns.com)所有,转载请注明出处。
本网转载并注明自其它来源的作品,均来自互联网或者用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。


焦点推荐

TOP1
深度解析2023年移动机器人行业的十大预测
2022-12-20
1082

TOP2
无人叉车在汽车汽配行业产线与仓储的应用逐渐增多,盘点6大应用难点
2022-07-28
1836

TOP3
利润大降22% | ABB公布2022年第二季度及上半年业绩
2022-07-28
2115

4
浙江数字经济“一号工程”如何升级?“数字工厂”和“未来工厂”有啥不同?省经信厅新闻发言人权威解答
2022-07-18
1621

5
宁波海曙发力打造智能制造集群,60个项目总投资达550亿元
2022-05-11
1467

6
数据公布!我国2022年3月份规模以上工业增加值增长5.0%,其中工业机器人产量44322套,增长16.6%
2022-04-20
9573

7
一文看懂机器人技术的发展史
2022-03-30
1960

8
万马股份:打造“中国籍”机器人线缆 助力产业链国产化进程
2022-03-29
1556
9
总额超107.02亿元!2022年Q1机器人行业融资一览
2022-03-29
1618

10
酝酿七年美的拿下库卡,机器人四大家族加快本土化布局
2022-03-29
1454