
高端装备制造行业发展现状与未来趋势
研究人员采用先进技术一次性造出仿生机器人手指
2020-08-26
阅读量:191 来源:机智网
导读
近些年来,仿生机器人手是一个研究热点,虽然灵活是他们的优点,但毕竟不是真实的人手,无法比拟一系列真人手可以做到的事情。灵活的机器人手无法处理重物,可以处理重物的刚性机器人手却需要复杂的制造或控制才能灵活一点,那么我们自然想把两者合二为一,最近就有科学家完成了这样的实验,让我们带大家来看一看。
在最近举办的机器人和环境智能国际会议(URAI)上,加利福尼亚大学圣克鲁 斯分校和日本立命馆大学的研究人员展示了一种受人体骨骼结构启发的仿生机器人手指,包括韧带结构、人造肌肉、粘弹性腱和刚性骨骼,完美的复制了人手的关节骨骼结构,‘软’‘硬’齐全。还利用了最先进的多材料3D打印技术,可一次性将仿生机器人手指打印出来。
图1. 受人体骨骼结构启发的仿生机器人手指
多材料3D打印
图中的驱动方式是不是看着很熟悉,其实所谓的粘弹性腱就是机器人设计中常用的肌腱驱动。但常规的肌腱驱动少不了复杂的制造和组装。
图2. 复杂的机器人肌腱驱动方式
如何避免这种复杂的制造和组装过程呢?研究人员想到了先进的多材料3D打印方法。我们平时常见的挤出式3D打印机都是只有一个喷头,只能同时打印一种材料。而多材polyjet 3D打印机可以创建具有不同刚度的材料的混合结构。利用这种方法可以将仿生机器人手指的肌腱,骨骼和关节等一次性打印出来,简化并加速整个原型生产过程。
图3. 多材料3D打印方法
具体来说,研究人员使用了两种肖氏硬度不同的3D打印材料:Vero Pure White(VPW)和Tango Black Plus(TBP)。VPW是一种较硬的类似塑料的材料,可用来打印骨骼;TBP是一种柔软的橡胶状材料,可用来打印关节软骨。肌腱,韧带等组件的打印可以通过组合这两种材料以获得不同的肖氏硬度。
仿生机器人手指的设计
仿生机器人手指的设计具有生物启发性的解剖特征,包括:近端指骨,中端指骨和远端指骨,不同大小的环形滑轮A2-A5,掌侧板,主韧带和副韧带,关节软骨,指浅屈肌(FDS)肌腱,指趾屈肌足底(FDP)肌腱和普通伸肌(CE)肌腱。
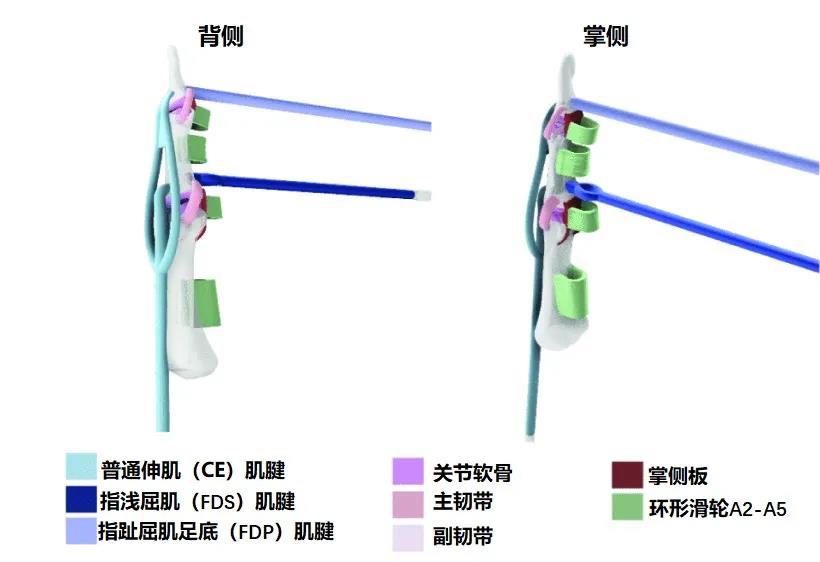
图4.具有生物启发性的解剖特征的仿生机器人手指的设计
图中的每一个组件都对仿生机器人手指起着重要作用。手指的掌侧的环形滑轮相当于人手指的肌腱鞘。掌侧板连接骨头的掌侧,并防止关节过度伸展。近端和远端指间关节的每一侧都存在主韧带和副韧带,它们是关节侧向运动最重要的稳定器。关节软骨可以防止关节处指骨的磨损。
3D打印制造方法需要详细的CAD模型,仿生特征可以在CAD软件中复杂地建模为装配体,分配独特的材料,并制成单个零件。该CAD模型完全模仿了人手的生物机械结构。
图5.人体骨骼结构开发的机器人手指CAD模型
仿生机器人手指的静止状态略微弯曲,类似于人的手指。

图6.静止状态的仿生机器人手指
肌肉为手指活动提供驱动力,研究人员利用这一特点,将仿生机器人手指的肌肉设计为气动波纹管,可随着内部压力的变化而上下伸缩。气动波纹管可以直接附着在人造肌腱上进行3D打印,一端连接到它驱动的肌腱上,而另一端则与气压系统对接,从而自动化肌腱的拉动和释放。单个气动波纹管可用于驱动多条肌腱,这也模仿了人类的手指中共享的指腹肌肉。
图7.气动波纹管人造肌肉驱动机器人手指
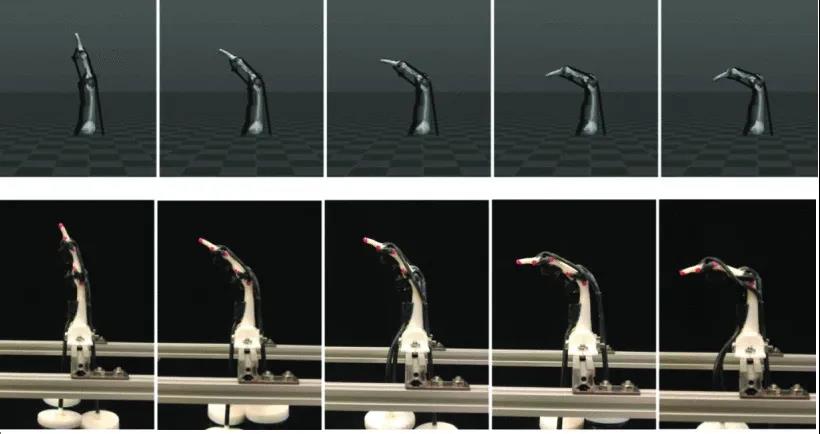
研究人员还使用了一种称为MuJoCo的流行物理仿真引擎开发了仿生机器人手指模型,这样一来,就可以将机器人手指在模拟中所获得的结果与现实环境中手指的印刷原型所获得的结果进行比较,从而优化设计并开发控制方案。
图8.仿生机器人手指的仿真与实验原型
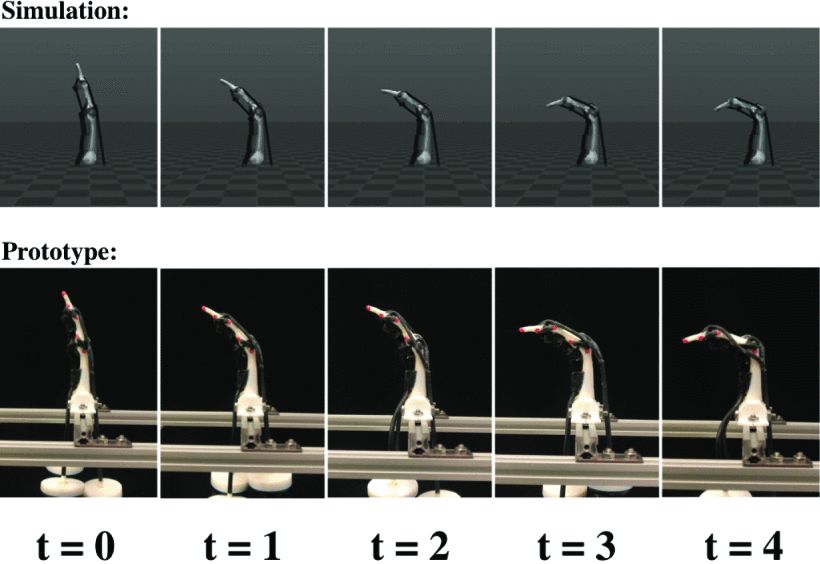
图9.MuJoCo模拟(上)和物理原型测试(下)。拉开两个屈肌腱,同时伸展普通伸肌腱。
总结与展望
这项工作突出了将3D打印和模拟技术相结合,以创建复杂的机器人系统的巨大潜力。研究人员使用的方法能够将软机器人技术中普遍使用的粘弹性材料与更传统的机器人技术相结合,从而使人类骨骼内结构的复制更为紧密。
这项工作的研究人员之一Maryam Tebyani表示“我们目前正在努力将该设计扩展到整个手和手腕,以实现对象操纵。”“我们还计划开发依赖于所提出的制造方法的变型的设计,以便可以使用其他机器人专家更容易使用的3D打印机实现这些系统。”
将来,这组研究人员使用的设计和制造过程可以应用于创建其他一些受生物启发的机器人结构,例如其他受人或动物启发的肢体。此外,他们开发的仿生手指可用于开发机械手,然后将其连接到现有的和新机器人上。
版权与免责声明:
如涉及网站内容、版权等问题,请及时通知我们,本网站将在第一时间及时删除。
本站注明“来源:机智网”的所有作品,版权均为机智网(www.jqzns.com)所有,转载请注明出处。
本网转载并注明自其它来源的作品,均来自互联网或者用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。


焦点推荐

TOP1
深度解析2023年移动机器人行业的十大预测
2022-12-20
1089

TOP2
无人叉车在汽车汽配行业产线与仓储的应用逐渐增多,盘点6大应用难点
2022-07-28
1841

TOP3
利润大降22% | ABB公布2022年第二季度及上半年业绩
2022-07-28
2123

4
浙江数字经济“一号工程”如何升级?“数字工厂”和“未来工厂”有啥不同?省经信厅新闻发言人权威解答
2022-07-18
1624

5
宁波海曙发力打造智能制造集群,60个项目总投资达550亿元
2022-05-11
1473

6
数据公布!我国2022年3月份规模以上工业增加值增长5.0%,其中工业机器人产量44322套,增长16.6%
2022-04-20
9579

7
一文看懂机器人技术的发展史
2022-03-30
1975

8
万马股份:打造“中国籍”机器人线缆 助力产业链国产化进程
2022-03-29
1564
9
总额超107.02亿元!2022年Q1机器人行业融资一览
2022-03-29
1624

10
酝酿七年美的拿下库卡,机器人四大家族加快本土化布局
2022-03-29
1462