
高端装备制造行业发展现状与未来趋势
不足1g微型机器人拖动2.6倍的机器人?承受这个身躯不该有的压力
2020-08-25
阅读量:179 来源:机智网
这款特别的「RoBeetle」仅靠甲醇来供能,虽说重量不足1克,却能拖运自身重量 2.6 倍的机器人,凭借着这篇关于他研究,南加州大学研究员、华科校友杨秀峰登上了 Science 机器人子刊封面。
普通的机器人一般都使用电池或插座供电,但一款名为「RoBeetle」的机器人却很是不同。这种和昆虫一般大小的微型机器人,重量不足 1 克,却能拖运自身重量 2.6 倍的物体。最特别的是,它是依靠甲醇来供能的。
甲醇是一种常见于溶剂和防冻剂中的有机化合物(假酒伤人的成分之一)。像甲醇这样的液体燃料,每单位体积所提供的能量会比电池更多,这就意味着甲醇驱动的微型机器人不再需要附加外部电源,比如电线、电磁场。从理论上讲,这种机器人比电力驱动的同类拥有更多的自主权,同时又能保持很小的尺寸。
在最新一期的《Science》机器人子刊中,来自南加州大学的研究者向公众介绍了这款名为「RoBeetle」的机器人。他们设计了可以像真实物体一般收缩和放松的微型人造肌肉,并且使用覆盖有铂粉的镍钛合金线加快甲醇蒸汽的燃烧。这一过程产生的热量会导致机器人腿部的电线缩短,待冷却后重新伸展,以此驱动 RoBeetle 的运动。
RoBeetle 重量仅有 88 毫克,能够拖运自身重量 2.6 倍的物体。它可以额外携带 95 毫克的燃料,续航时间长达 2 个小时。RoBeetle 拥有爬坡技能,并且可以在不同纹理的表面行进,包括玻璃、泡沫睡垫、混凝土人行道。
在未来的研究中,研究者需要进一步探索如何实现机器人的燃料添加功能,从而在更长的时间内持续供能。此外,如果能够对 RoBeetle 进行编程并实现与操作者通信,那么这款机器人还能用于人工授粉或协助手术等更多场景。
RoBeetle 技术详解
用于微型机器人驱动的催化人造肌肉
为了创建能够驱动昆虫大小爬虫机器人的 2H 微致动器,研究者将燃料的 HEDs(下图 1A)和 SMAs 的 HWDs(下图 1B)结合起来。
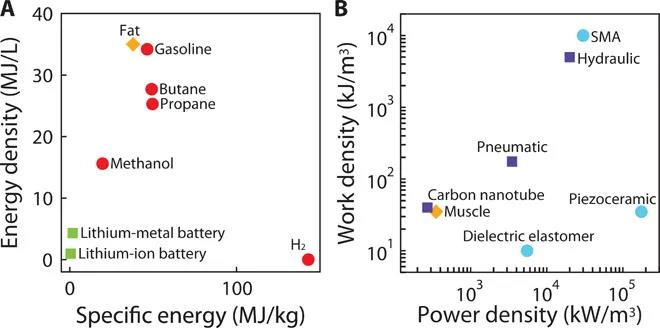
图 1:实现微致动的能量源和致动方法。
致动机制的核心组件是下图 2A 中的人造肌肉,它包含一个镍钛合金核(NiTi core)和一个凝集铂(Pt)粉的外催化层。在操作过程中,复合线材(composite wire)的 SMA 核心被催化表面上燃料的可控催化燃烧所产生的热量激活。
下图 2C 至 2E 为 NiTi-Pt 复合线材表面的扫描电子显微镜(scanning electron microscope, SEM)图像,它们是通过在《Materials and Methods》以及下图 S1 中描述的方法生成的。
下图 2F 展示了确定的主回路和两个副回路,其中应力为 164MPa,并与驱动 RoBeetle 原型的 9.8mm 长 NiTi-Pt 线连接。主回路指的是加热冷却回路,在这个过程中,SMA 材料完成了从马氏体状态(martensitic state)到奥氏体状态(austenitic state)的完全相变,然后又完全地回归马氏体状态。
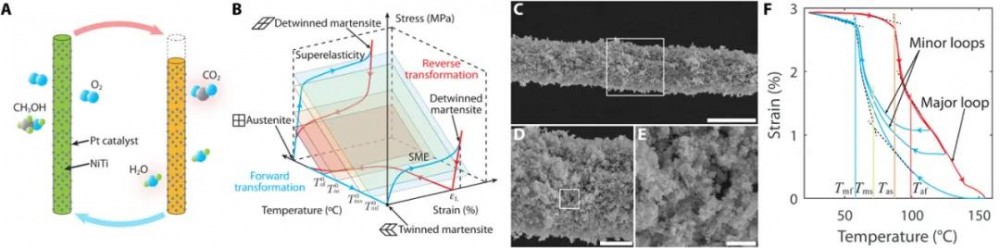
图 2:催化人造肌肉。
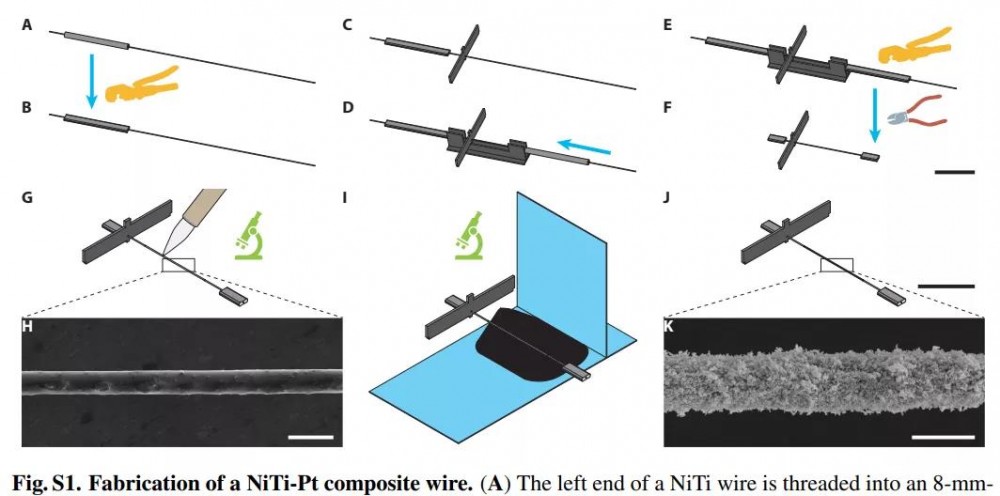
图 S1:NiTi-Pt 复合线材的制作过程。
设计原理 Design of RoBeetle
为了验证 2H NiTi-Pt 致动器的性能,研究者创建了自动 RoBeetle 的原型,具体如下图 3A 所示。RoBeetle 通过基于可变摩擦的运动方式来实现爬行。但是,本研究提出的致动方法可以赋能一系列微型机器人平台,进而实现机器人的行走、跳跃、游泳和飞翔动作。
下图 3B 展示了致动、感知和反馈控制的联合机制;图 3C 至 3H 展示了实现自主操作所需的所有组件,包括 NiTi-Pt 复合线材、MCM 以及燃料箱和其他结构构件。

图 3:RoBeetle 的设计原理。
就功能而言,这些组件分为以下四类:
第一类包含构成 RoBeetle 躯干的组件,即存储甲醇的燃料箱(图 3C 和 3D);
第二类由 MCM 组件组成,即燃料舱盖和滑动闸板(图 3E);
第三类由构成致动机制的组件组成,包括 NiTi-Pt 线和传动装置(图 3E)、叶片弹簧(图 3C 和 3G)、以及用于安装叶片弹簧的两个喇叭状静态臂和支撑复合线的后锚块夹具(图 3C);
第四类由带爪的仿生微型机械腿组成,它们能够诱发各向异性摩擦,进而模拟亚种群甲虫 Pachnoda marginata peregrina 的摩擦机制。
实验
系留固定实验
为了获取适合 MCM 设计的参数,该研究使用了多个 RoBeetle 原型来进行一系列系留实验。
具体来说,研究者测量了与微型机器人操作相关的最相关变量,包括 NiTi-Pt 线的表面温度和产生的自振荡致动应变,如下图 4 所示。
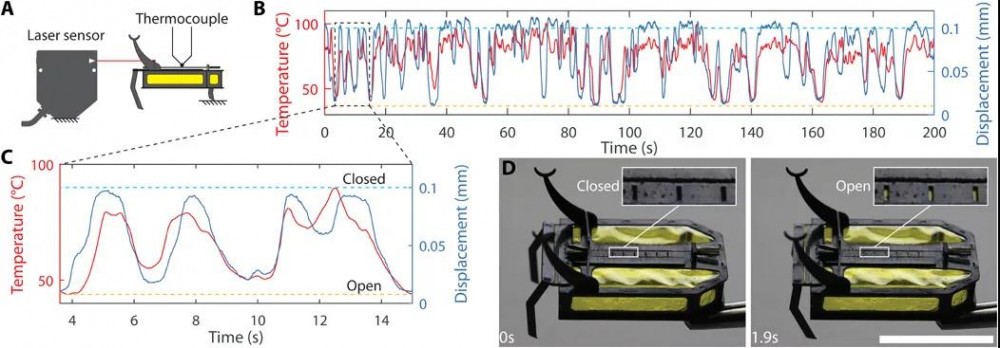
图 4:用于测试 RoBeetle 原型特性的系留固定实验。
自主运动
为了验证提出的致动方法并探究 RoBeetle 原型的运动性能,研究者进行了两种类型的实验:静止(stationary)条件和平缓移动条件下的自主爬行。这两个实验旨在根据平均爬行速度来突出最坏和最佳情况下的操作条件。
下图 5A 中展示了第一类运动测试的实例,图 5B 展示了第二类运动测试的实例。与这两个测试相对应,机器人位置随时间变化的情况如图 5C 所示。
操作过程中,机器人后腿爪部到前腿爪部的距离随着人造肌肉的收缩呈现周期性增加,同时随着人造肌肉的延伸而距离缩小。
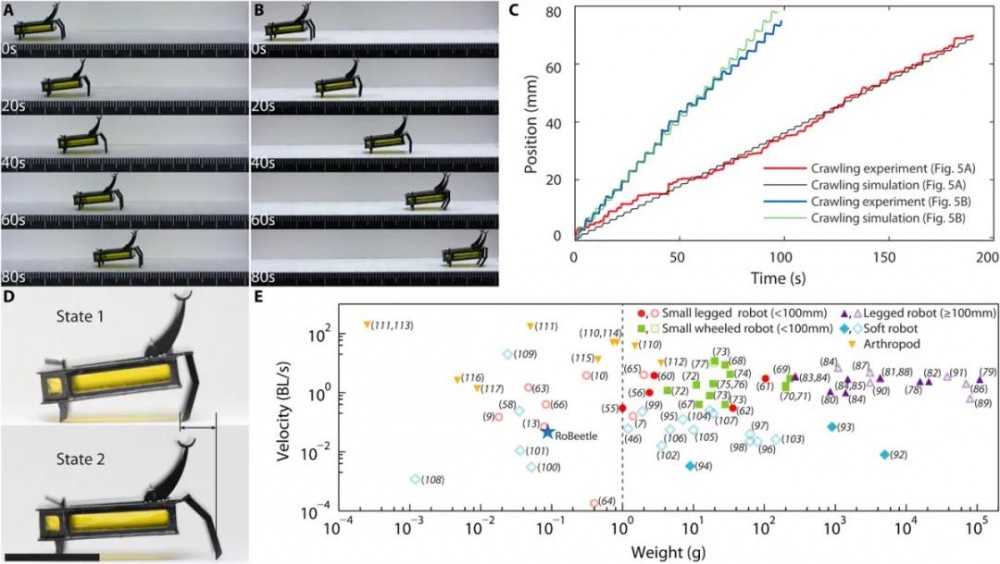
图 5:该机器人在两种环境条件下的自主运动。
功能和运动性能
从最基本的导航角度来看,自主地面机器人必须能够爬坡、运载有效载荷并在各种不同的表面上运动。因此,为了评估 RoBeetle 的功能,研究者进行了进一步的实验。
首先是坡道攀爬,下图 6A 至 6C 展示了 RoBeetle 分别在倾斜度为 5°、10° 和 15° 的斜坡上爬行的样子。RoBeetle 原型可以轻松地在 5° 和 10° 的坡度上攀爬,但在 15° 倾斜度上攀爬的时候出现了下滑。与在水平面上相比,测得的相应速度如下图 6D 所示。
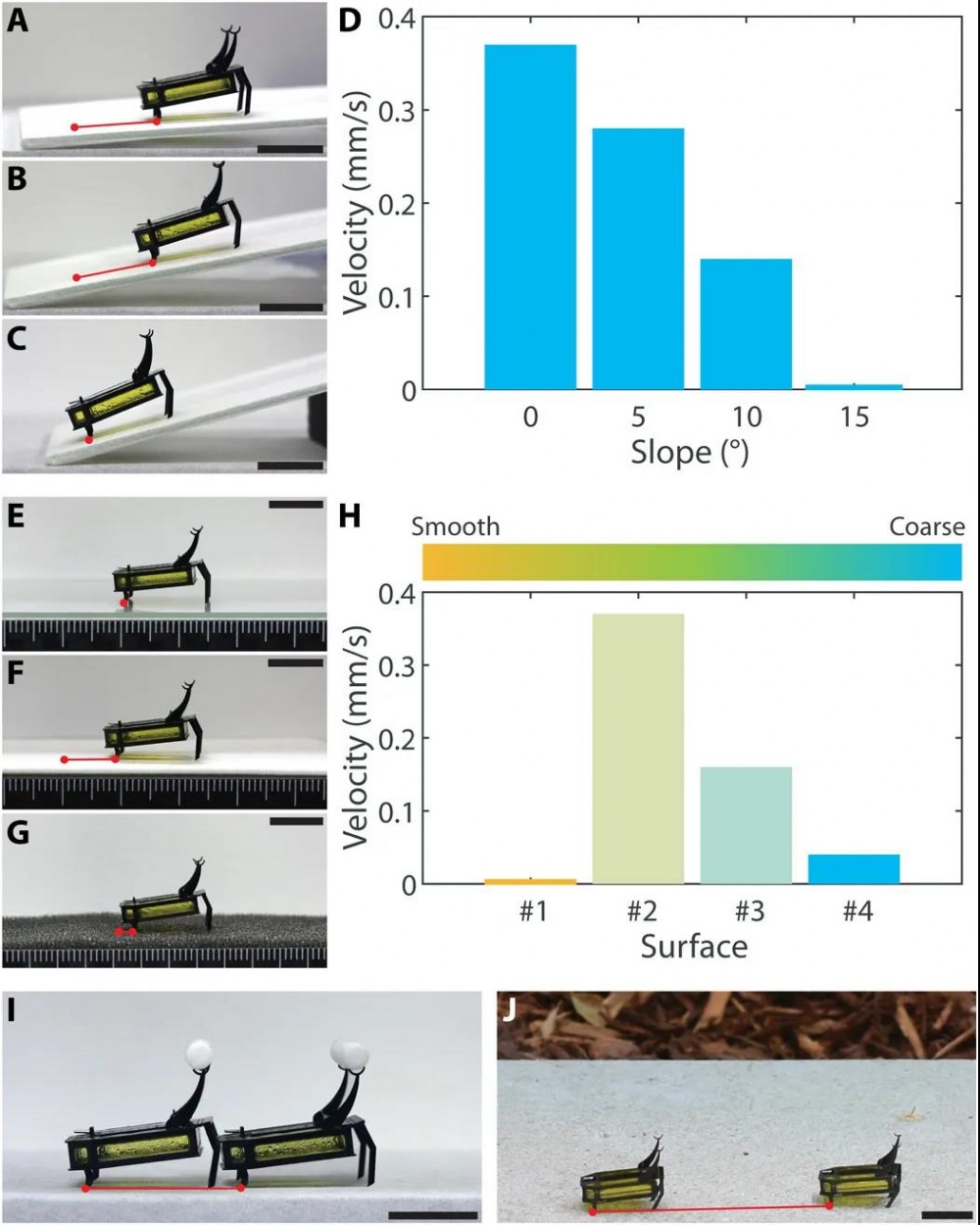
图 6:在不同的实验设置下的运动及其达到的速度。
有效载荷行进演示
研究者演示了 RoBeetle 携带有效载荷的能力,并展示了机器人执行简单自动化任务时与环境的交互,具体如下图 7 所示:
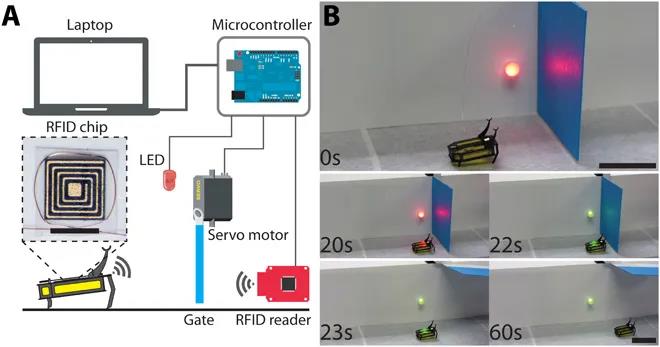
图 7:机载射频识别芯片实现了机器人与环境的交互。
一作为华科校友
本篇论文的一作是来自南加州大学的研究员杨秀峰,本科和硕士均就读于华中科技大学。2015 年开始,杨秀峰在南加州大学担任研究助理,并于今年 5 月获得机械工程博士学位。
杨秀峰研究员是一位在机械工程领域富有远见的研究人员。他在机电设计和控制方面拥有深厚的研究背景,推动了尖端移动机器人领域的发展。同时,杨秀峰也是跨学科机器人领域有力的贡献者和组织者。
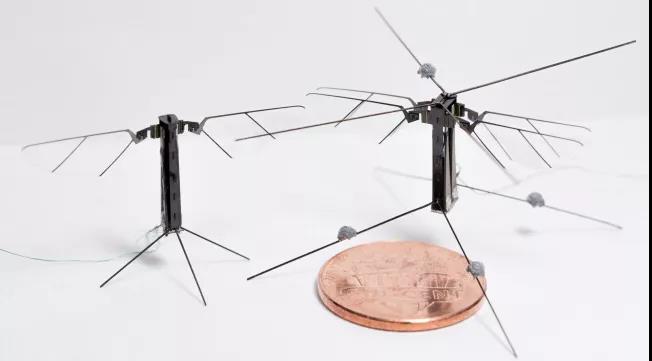
此外,杨秀峰也曾发表过多项微型机器人相关研究。2019 年 10 月,微型昆虫飞行机器人「Bee+」曾刊登在《IEEE 机器人与自动化快报》,并入围 IROS 2019 最佳论文奖提名。这款机器人拥有四枚 33 毫米长的翅膀,重量仅为 95 毫克,能够实现在飞行中避障,相比于同类机器人也具备更高的耐用性。
2019 年 12 月,杨秀峰和其他研究者合著的论文《Control of Flying Robotic Insects: A Perspective and Unifying Approach》发表在机器人国际顶会 ICAR 2019。
版权与免责声明:
如涉及网站内容、版权等问题,请及时通知我们,本网站将在第一时间及时删除。
本站注明“来源:机智网”的所有作品,版权均为机智网(www.jqzns.com)所有,转载请注明出处。
本网转载并注明自其它来源的作品,均来自互联网或者用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。


焦点推荐

TOP1
深度解析2023年移动机器人行业的十大预测
2022-12-20
1077

TOP2
无人叉车在汽车汽配行业产线与仓储的应用逐渐增多,盘点6大应用难点
2022-07-28
1832

TOP3
利润大降22% | ABB公布2022年第二季度及上半年业绩
2022-07-28
2106

4
浙江数字经济“一号工程”如何升级?“数字工厂”和“未来工厂”有啥不同?省经信厅新闻发言人权威解答
2022-07-18
1617

5
宁波海曙发力打造智能制造集群,60个项目总投资达550亿元
2022-05-11
1458

6
数据公布!我国2022年3月份规模以上工业增加值增长5.0%,其中工业机器人产量44322套,增长16.6%
2022-04-20
9570

7
一文看懂机器人技术的发展史
2022-03-30
1951

8
万马股份:打造“中国籍”机器人线缆 助力产业链国产化进程
2022-03-29
1546
9
总额超107.02亿元!2022年Q1机器人行业融资一览
2022-03-29
1610

10
酝酿七年美的拿下库卡,机器人四大家族加快本土化布局
2022-03-29
1445